GTBZ14JD Piattaforma operativa aerea con pedivella elettrica





I. Panoramica e caratteristiche del prodotto
Le piattaforme aeree elettriche a manovella sono sviluppate da XCMG, strutture compatte e carrozzeria del veicolo larga 1,75 m.Il sistema di controllo intelligente e perfetto presenta il layout umanizzato, il design esente da manutenzione e la facilità d'uso e manutenzione, fornendo le molteplici opzioni e la sicurezza completa.
[Vantaggi e caratteristiche]
La mietitrebbia con braccio a forma di ●Σ e il design a deriva zero la rendono più produttiva.
●Un raggio di sterzata di soli 3,15 m consente alla macchina di lavorare in spazi ristretti.
● La batteria di grande capacità da 48 V e 420 Ah rende la capacità di crociera più lunga.
●Tecnologie avanzate di funzionamento del motore CA;tecnologie di controllo del differenziale di sterzo;azioni potenti e costanti;pendenza superabile fino al 30%
● La pompa DC e le tecnologie di controllo proporzionale sono a risparmio energetico ed efficaci, rendendo il lavoro più stabile e sicuro.
● Rispettoso dell'ambiente, zero emissioni, basso rumore, viaggio senza tracce, adatto per la costruzione di interni.
II.Introduzione delle parti principali
1. Parte del telaio
Configurazioni principali;2 ruote motrici, due ruote sterzanti, pneumatici pieni.
(1) Velocità massima di guida a 5,2 km/h.
(2) Pendenza superabile massima al 30%.
(3) Viene applicato il riduttore di marcia integrato che integra il motore e il riduttore e vengono fornite due velocità di guida (alta velocità e bassa velocità) per soddisfare le esigenze di guida della macchina in ambienti diversi.Il meccanismo di traslazione è dotato di funzione autofrenante durante la marcia in pendenza ed è dotato di dispositivo a frizione per facilitare il traino in caso di malfunzionamento.
(4) Meccanismo manovella-cursore per girare per realizzare un raggio di sterzata più piccolo;
2. Parte del braccio
(1) Braccio pieghevole + braccio telescopico + manovella
(2) Materiale del braccio: il braccio è saldato in acciaio ad alta resistenza per realizzare un peso leggero e un'elevata sicurezza.
(3) Il braccio pieghevole è costituito da due serie di strutture a parallelogramma, con collegamento intermedio, e potrebbe muoversi contemporaneamente con l'ausilio del cilindro di brandeggio, rendendo il lavoro più efficace.
(4) Due sezioni di bracci telescopici di tipo telescopico monocilindrico;le pedivelle sono a parallelogramma
3. Parte giradischi
(1) rotazione discontinua di 355° e due fori di montaggio per il trasferimento dei perni di bloccaggio;
(2) Il giradischi è composto da un'unica piastra con nervatura di rinforzo;i punti di cerniera sono ben posati e il contrappeso è posizionato nella parte posteriore del giradischi;
4. Parte della piattaforma
(1) Piattaforma di lavoro grande 1,4 m × 0,7 m.
(2) Piattaforma girevole a 160°.
(3) Capacità di carico fino a 227 kg.
(4) Sistema di livellamento automatico elettroidraulico proporzionale.
5. Sistema idraulico
(1) Parti idrauliche - Le parti principali, tra cui la pompa idraulica e la valvola principale, adottano prodotti di marca di fama internazionale.
(2) L'impianto idraulico è azionato dalla pompa della batteria;la pompa ad ingranaggi è azionata direttamente dal motore.
(3) Il sistema idraulico della sovrastruttura è un sistema di pompa ad ingranaggi a flusso costante: basato sulle tecnologie di controllo proporzionale elettroidraulico, la macchina potrebbe eseguire la rotazione della sovrastruttura, l'inclinazione del braccio, la retrazione/estensione del braccio, l'oscillazione del lavoro piattaforma;la valvola principale di sovrastruttura è di valvola proporzionale elettroidraulica.
(4) Unità di alimentazione di emergenza installata - Può garantire che il braccio possa essere ritirato allo stato di guida in caso di malfunzionamento del motore o della pompa dell'olio.
6. Impianto elettrico
(1) Tecnologia di controllo PLC - Viene fornito un controller ciascuno per la piattaforma girevole e la piattaforma.Un boxy di controllo è installato rispettivamente per la piattaforma girevole e la piattaforma del telaio per controllare il telaio, la piattaforma girevole, il braccio e la piattaforma.
(2) Principali elementi di controllo - sterzo del telaio e controllo della traslazione;la rotazione del giradischi;braccio telescopico;controllo dell'orzata;la rotazione della piattaforma
(3) Metodi multipli di protezione di sicurezza - monitoraggio dell'azionamento del motore;protezione da sovraccarico del motore;avviso di ribaltamento del veicolo;avviso di sovraccarico;corsa ad alta velocità limitata;caduta di emergenza;
III.Configurazione delle parti principali di GTBZ14JD
| S/N | Nome | Quantità | Nota |
| Batteria | 8 | Troiano | |
| Caricabatterie | 1 | Dongguan Longsheng | |
| Azionamento a motore | 2 | CURTIS | |
| Riduttore di viaggio | 2 | Onni | |
| Motore a corrente alternata funzionante | 2 | KDS | |
| Pompa della batteria principale | 1 | BUCCHER | |
| Pompa batteria ausiliaria | 1 | BUCCHER | |
| Pompa principale | 1 | Sant | |
| Cilindro oscillante | 1 | HELAC USA | |
| Cilindro livellatore | 2 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Cilindro di brandeggio del braccio n. 1 | 2 | ||
| Cilindro di brandeggio del braccio n. 2 | 1 | ||
| Cilindro della pedivella | 1 | ||
| Cilindro telescopico | 1 | ||
| Cilindro dello sterzo | 1 | ||
| Valvola di bilanciamento | 5 | Sant/EATON | |
| Controllore | 2 | Hirschmann | |
| Sensore di inclinazione a doppio albero | 1 | Parker | |
| Schermo | 1 | Xuzhou Hirschmann Electronic Co., Ltd. | |
| Telecomando da gioco | 2 | Danfoss | |
| Interruttore a pedale | 1 | SOLI | |
| Rotazione e guida | 1 | Huafang | |
| Motore oscillante | 1 | Bianco | |
| Pneumatici | 4 | Laizhou Yishimai |
IV.Tabella dei principali parametri tecnici GTBZ14JD
| Articolo | Parametro |
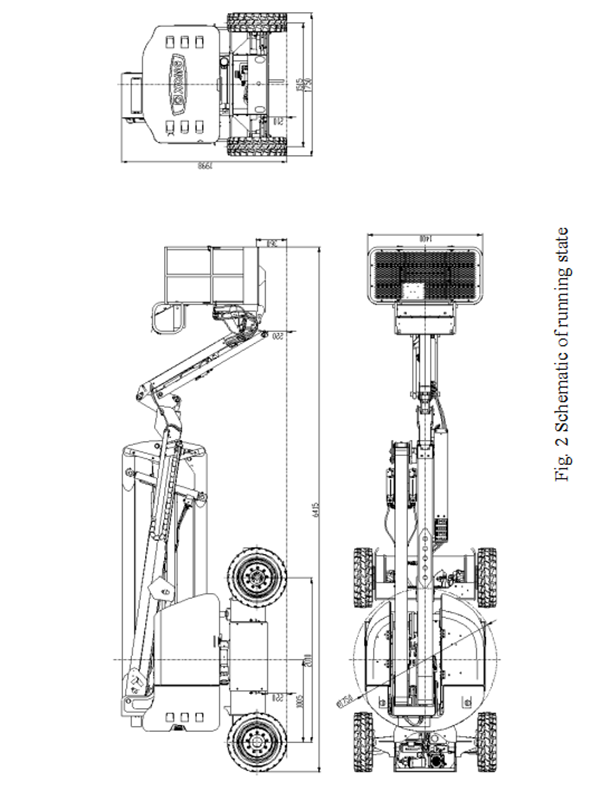
| Parametri dello stato di esecuzione | |
| Dimensioni complessive (L × P × A) | 6,42×1,75×2 m |
| Dimensioni di ingombro della piattaforma di lavoro | 1,4×0,7×1,15 m |
| Velocità massima | 5,2 chilometri all'ora |
| Gradabilità massima | ≥30 % |
| min.raggio di sterzata esterno | ≤3,15 mt |
| Altezza da terra/m (centro) | 0,21 mt |
| Interasse | 2 m |
| Massa totale | 6500kg |
| Parametri principali delle prestazioni operative | |
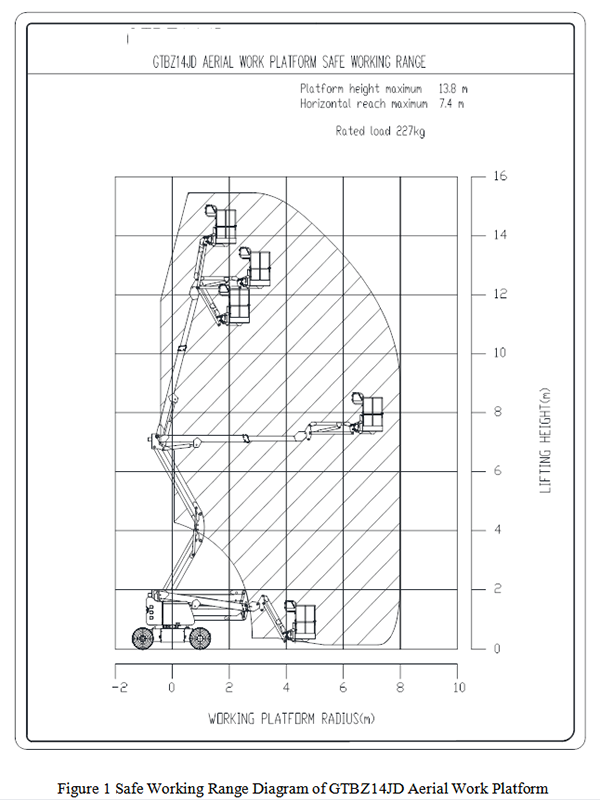
| Altezza di lavoro nominale | 15,5 m |
| Altezza massima della piattaforma | 13,8 mt |
| Massimo.campo di lavoro | 8 m |
| Altezza massima della rete | 7,03 mt |
| Ambito di orzata del braccio n. 1 | 0°~60° |
| Ambito di orzata del braccio n. 2 | -8°~75° |
| Ambito di orzata della pedivella | -60°~80° |
| Portata dell'oscillazione della piattaforma | 180° |
| Angolo di rotazione | 355° |
| Raggio di rotazione della piattaforma girevole | 0,875 mt |
| Carico massimo | 227kg |
| Massima rotazione all'indietro | 0 m |
| Sistema di controllo | Controllo proporzionale 12V DC |
| Pneumatico | Gomma piena 250-15, opzionale 240/55 D17.5 |
| Parametri di potenza | |
| Fonte di potere | 420 Ah/48 V CC |
| Alimentatore | 4 kw/48 V CC |
| Unità di potenza ausiliaria | 2,2 kW/24 V CC |
| Motore funzionante | 3,3 kW/32 V CA |
V. Diagramma del campo di lavoro sicuro della macchina
Allegato: configurazioni opzionali
6.1 Pneumatico solido ecologico (traceless)
6.2 Alimentazione della piattaforma
Il generatore idraulico o l'alimentatore esterno è collegato a questa piattaforma per l'uso.
Specifiche del cavo di alimentazione: 4 × 4 mm2
Corrente nominale: 35A
6.3 Tubo dell'aria della piattaforma
L'alimentazione dell'aria esterna viene convogliata a questa piattaforma per l'uso.
Diametro del tubo dell'aria: 8 mm
6.4 Staffa antiurto della piattaforma
Il dispositivo antiurto pieghevole dovrebbe proteggere l'operatore dall'urto con il suddetto oggetto durante il sollevamento della piattaforma, e potrebbe anche essere pieghevole, non occupando lo spazio di lavoro.